
Ciro Santilli's hardware Cycling clothes Updated 2026-02-08
2026-02-07: might have lost a the left North Face etip recycled gloves black with white signs, rebuying without too much thinking, redundancy is fine now that I'm old and don't have time: www.amazon.co.uk/dp/B08BDPDNH7
2025-12-28: after losing the Karrimor X Lite Run Black Headband for good going to try a few ones online:
- www.amazon.co.uk/Flintronic-Headbands-Headband-Stretchy-Running/dp/B0D3V4JQHS Chinese generic, 2 for 6 pounds. Band Material Type Cationic fleece.
- www.amazon.co.uk/Columbia-Weather-Headband-Heather-X-Large/dp/B08MQS7NYB Columbia Men's Fast Trek Ii Cold Weather Headband. Size: L/XL, Colour: City Grey Heather
2024-11: OK, I give up, going to try and find the Extremities XDRY again, as these are the perfect gloves for the UK. Buying www.amazon.co.uk/dp/B00OISFUQ4. Their marketing is very confusing and there are several different names for the product, but the label reads "extremities insulated waterpoof sticky power liner glove", black, large. This is the official page: www.terra-nova.co.uk/products/insulated-waterproof-sticky-power-liner-gloves X-Dry Stretch, 100% polyester.
2024-10: going to try Endura Men's Strike Glove - Hi-Viz Yellow, Large www.endurasport.com/strike-glove-hi-viz-yellow/12929542.html | www.wiggle.com/endura-strike-gloves-930526#colcode=93052613. These gloves are high quality, but they are too hot and fleecy for the UK, unless it is an exceptionally cold winter day around 0. This means that they get quite wet from sweat, and they are not that breathable. Also they are very hard to take off and put on, which is painful if you are like me who uses your cell phone for navigation, and while it works with touchscreens, sometimes it's just too annoying and you have to take them off.
2024-05: going to try www.sealskinz.com/products/water-repellent-all-weather-glove Sealskinz Tasburgh Water Repellent All Weather love black large because Extremities XDRY has a hole on right thumb due to gear shifting. This glove is very similar to the Nike academy hyperwam, not really a winter glove feels like. Weird branding...
2023-11: Endura Windchill Bibtights XL - Black: www.endurasport.com/windchill-bibtights-black/12926004.html because knees of dhb one open. I'm an idiot for getting XL... it's just that L felt too short on the top. But ultimately XL was too baggy, this became quite apparent on first usage, L would likely have been better, just would have needed to pull it a bit more. Quality is very good, very water repellent, kept me warm on 2C under very light rain. Also tried www.endurasport.com/xtract-bibtight-black/12926142.html but the sizing was completely different. L on that one as obviously too large, M felt correct.
2023-07: lost my waterproof cap, not cycling specialized, but was useful. Was by itself in crappy backpocket of cheap muddy fox jersey, lots of wind, some fence jumping... Hadn't noted know the brand/model... sad. Let's try Castelli A/C 2 Cycling Cap? www.castelli-cycling.com/US/en/Men/Collection/Hot-Weather-Kit/A-C-2-CYCLING-CAP/p/4523032_008 Single size. Slightly small, but hard to be sure.
2023-07: www.dhbsport.com/products/aeron-short-sleeve-jersey-2-0 dhb Aeron Short Sleeve Jersey 2.0 Colour Ink Blue Size (Standard) L. To prevent crap from falling again hopefully. Felt too small. Material: 100% polyester, inserts, 64% polyester, 6% elastane. Compared to the non 2.0 which I have, the material feels more glossy/slippery. Slightly weird.
2023-05: www.wiggle.com/p/dhb-classic-shorts?color=black&sizeStandard=M dhb Classic Shorts, medium.
2022-05: buying another "dhb Lightweight Mesh Long Sleeve Base Layer", small www.wiggle.com/p/dhb-lightweight-mesh-long-sleeve-base-layer. I notice that it is actually a bit not long enough. Doesn't make a huge difference, but maybe medium or large next time.
2022-12 Rohan Polar Gloves, black, large, 45 pounds. Shell: 85% polyamide, 15% elastane. Insulation: 100% polyester. 100g insulation on back of the hand. www.rohan.co.uk/mens/accessories-polar-gloves Let's see how they perform after hands were very cold on a bike ride with the Extremities XDRY.
2022-08 dhb Aeron Short Finger Gel Gloves 2.0 medium white www.wiggle.co.uk/dhb-aeron-short-finger-gel-gloves-20. For sun/fall protection. In theory should be small according to size guide, but small was over, and I have my doubts it is correct.
2021-12: bought a North Face etip recycled gloves black with white signs, large about 40 dollars: www.thenorthface.co.uk/shop/en-gb/tnf-gb/mens-etip-gloves-4sha?variationId=KY4 let's see how that goes. These ended up being very good. They are not very warm, good for 10-15 C maybe, which is a important range. Water performance is very good
2021-12:
- dhb Windproof Cycling Gloves Small Black 33 dollars to replace the Nike academy hyperwam gloves which I lost a pair of recently. It already had a hole in the thumb anyways from shifting the small gears all the time. S was way too small despite me making hand measurement, returned.
- dhb C1.0 Crossover Helmet Matte Black 58-61cm 40 dollars after recent crash to ensure helmet integrity
2021-06: Castelli UPF 50+ Light Arm Sleeves (Skins) Large White, 29 pounds www.castelli-cycling.com/bg/upf-50-+-light-arm-sleeves/p/451603621P-001. Felt really good. Really does not trap much heat, and completely blocks off sun. It makes you develop a small layer of sweat that keeps you cool, cooler than without the sleeves.
2021-02 Castelli PRO THERMAL SKULLY red www.wiggle.co.uk/castelli-pro-thermal-skully www.castelli-cycling.com/gb/pro-thermal-skully/p/452054220A to help with cold, the X Lite Run Black Headband is just not made for winter.
2021-01: Madison Cycle Everywear Sportive Toe covers. L/XL. www.madison.cc/shop/sportive-thermal-toe-covers/VARCLA121/CLA12104
2021-01: "Endura FS260-NEMO Glove II" Neoprene Winter Handwarmer Large. www.endurasport.com/Gants-Nemo-FS260-Pro-II/p/E1216-Black Let's see how neoprene feels like. Basically it becomes wet with your transpiration, but is still relatively warm, would take it well down to 5C. Likely would work well with heavy rain. Not bad. But does feel a bit cooler than the Extremities XDRY, especially after you walk for a bit, and your hand becomes cold, and it is very hard to warm it because it is also wet.
2020-12-21: "dhb Neoprene Nylon Overshoes" www.wiggle.co.uk/dhb-neoprene-nylon-overshoes large black. After 2 rides, noticed that the front lower part of left foot (the one I put on and off the most) had a hole in it, not sure where it was made. Edit: I later noticed that it is because I have the reflex of braking slightly with my shoes in certain conditions, e.g. at lower speeds in close proximity to pedestrians, the sounds of which also serve as a way to alert them without the need for a loud bell. But it destroys the overshoe, so I have to undo that reflex.
2020-11-06 www.alpinetrek.co.uk/castelli-perfetto-ros-long-sleeve-cycling-jersey/ "Castelli Perfetto RoS Long Sleeve - Cycling jersey" size L Large. On Wiggle: www.wiggle.co.uk/castelli-perfetto-ros-long-sleeve-jersey Feels great. Together with the dhb Merino Long Sleeve Base Layer, I can gown down to 0 Celcius, no problem, and up to 14 with the "Mesh Long Sleeve Base Layer". Breathes great, blocks wind and rain reasonably, and can holds mild rain out on a short 1.5h ride without problem. I used this so much it is unbelievable.
2020-10-17:
- last ride top was a bit cold on shoulders where not covered by arm warmers, about 10C, so going to try: www.wiggle.co.uk/dhb-aeron-rain-defence-polartec-jacket-1 "dhb Aeron All Winter Softshell Jacket", 109.25 pounds, Fluro Yellow, small to match previous tops that worked, approx: 50 polyester, 40 polyamide, 10 elastane, recommended temperature: 2-12 degrees Celcius. Material felt OK, not amazing but OK. Returned because a bit too small.
- the "dhb Classic Thermal Bib Tights" is a bit too warm for lower tens, so going to try "dhb Aeron FLT Roubaix Bib Tight", 85.50 pounds, medium, navy color, recommended temperatures: 6-14 deg C, 84% polyamide, 16% elastane. Hopefully not being marked as "thermal" means it is less warm. Also hopefully being DHB Aeron it will be a bit less baggy behind knees. Returned later because felt indistinguishable from the "dhb Classic Thermal Bib Tights".
For sizing see also: Ciro Santilli's body.
2020-11: Castelli Thermoflex 2 Arm Warmers, Large, 28 pounds: www.wiggle.co.uk/castelli-thermoflex-2-arm-warmers | www.castelli-cycling.com/gb/men/accessories/cycling-leg-and-arm-warmers/p/451953020A-010 advertized 8°-20°C. Was going to buy the DHB ones for 10 pounds less, but always out of so Castelli it is.
2020-08: started getting getting cold, so let's do it:
- www.wiggle.co.uk/dhb-lightweight-mesh-long-sleeve-base-layer "dhb Lightweight Mesh Long Sleeve Base Layer", small, 93% polyester 7% Elastane. Felt a little bit tight on first try, but I think I'll keep it, it might be correct, it's hard to say, and it's not worth my time. If it is too bad I'll just get another one later.
- www.wiggle.co.uk/dhb-classic-thermal-bib-tights "dhb Classic Thermal Bib Tights", medium, 86% polyamide, 14% elastane, 56 pounds. Very slightly tight, but felt right on first try. Some similar URLs www.wiggle.co.uk/dhb-classic-thermal-bib-tights-1 | www.wiggle.co.uk/dhb-thermal-bib-tight
- www.wiggle.co.uk/dhb-extreme-weather-neoprene-overshoe "dhb Extreme Weather Neoprene Overshoe", large, 81% polyamide, 18% polyurethane. Wanted to buy www.wiggle.co.uk/dhb-neoprene-nylon-overshoes which is lighter, but was out of stock. The material felt good, but it did not fit with 2020-04 Giro Rumble VR Off Road Shoe, I should have checked better, maybe it is only for road shoes.Incompatible with 2020-04 Giro Rumble VR Off Road Shoe, so returned it. That shoe is too large.
2020-05 www.wiggle.co.uk/dhb-aeron-short-sleeve-jersey-4/ dhb Aeron Short Sleeve Jersey 100% polyester, Red Large. This one fit OK. Length feels right. When on cycling position, a bit baggy under arms though, but guessing M would be too short? Still already feels less baggy than the cheap muddy fox jersey. Aeron is the second lowest level of DHB top, after the super basic 25 pound one. Material is thin polyester, could be better, but OK.
2020-05 www.wiggle.co.uk/castelli-perfetto-light-2-short-sleeve-jersey/ Castelli Perfetto Light 2 Short Sleeve Jersey 84% Nylon, 16% Lycra. When it arrived, was WAY too small, so returned. Material looked and felt amazing.
2019-12 www.wiggle.co.uk/dhb-merino-long-sleeve-base-layer-1/?sku=5360752872 "dhb Merino Long Sleeve Base Layer", black, small, was right size, wool is a bit itchy, but does feel like it dries off more quickly on long rides than the cheap Muddy Fox polyester cycling Jersey. Pretty warm, too much for 15C.
2019-12 www.wiggle.co.uk/dhb-aeron-winter-weight-merino-sock/?sku=100335580 dhb Aeron Winter Weight Merino Sock, blue, UK 9.5-12. Did not seem to make much of a difference, feet still cold, not wet.
2019-11 Nike academy hyperwarm gloves: www.nike.com/gb/t/hyperwarm-academy-football-gloves-s9Dd8D/GS0373-013 (archive) for 17.99 Pounds from physical retailer. Good intermediate between the Extremities gloves when it gets a bit warmer. 60% polyester/27% nylon/5% rubber/4% elastane.
2019-10 XGC Men's Cycling Shorts/Bike Shorts And Cycling Underwear With High-Density High-Elasticity And Highly Breathable 4D Sponge Padded www.amazon.co.uk/dp/B07BDJP64W (archive). Grey color, red inner butt padding. 2020-08: after using it a lot, noticed that the padding stiches started to come off a bit.
2018 (?) Extremities XDRY gloves Looks like: www.sportsdirect.com/extremities-wp-p/line-glove-91-907293 (archive) Gets wet after a few minutes of medium rain. But does dry quickly. Baggy, multilayer. Says 40 pounds, but always at 20 pound discount, so it is just a marketing trick. On website: Outershell 96% Polyester/4% Lycra (Spandex)Palm 45% Polyester/55% PolyurethaneLining 100% Polyester
2017-09 Trespass Cruzado Male Gloves size S. www.trespass.com/cruzado-unisex-gloves (archive) Markings: crossover gloves. Technical Performance TP75: www.trespass.com/advice/trespass-tp-ratings-guide/ Lost right hand around 2018/2019.
2017 Muddy fox cycling Jersey, orange, polyester, Large, cheap. Works well enough I guess. Could be a bit more tight fitting.
2017 www.amazon.co.uk/Nevica-Unisex-Reversible-Skuff/dp/B07GSD4R7Y Nevica Skuff black
2017 www.ebay.co.uk/itm/254646634761 Karrimor X Lite Run Black Headband. Had a hole in the ear for a long time. Miraculously surived being almost lost on several occasions, including once it fell off from bike and a dude coming behind pointed it to me. But then alas on 2025-12-28 I lost it, noticed next day wasn't there, by chance found it on neighboring park, but it had been torn very badly, a dog must have done that, so I had to throw it away!
Ciro Santilli's hardware Epson XP-640 Updated 2026-01-30
The cartridge is number 33 or 33 XL.
Ciro Santilli's hardware Lenovo ThinkPad P14s gen4 amd Updated 2026-01-30
Bought: November 2023 during Black Friday sale for £1,323.00 to be Ciro Santilli's main personal laptop.
Six years after, and we are 2x on every key spec (except processor Hz ;-) at about 1/2 the price and 1/2 the weight (though smaller 14" screen for greater portability), so not bad! Customized to max out each hardware spec:
Specs:
- Processor: AMD Ryzen 7 PRO 7840U Processor (3.30 GHz up to 5.10 GHz)
- Graphic Card: Integrated GraphicsThe Ubuntu 23.10 "About system GUI describes its graphics as: Radeon 780M Graphics × 16, which e.g. www.techpowerup.com/gpu-specs/radeon-780m.c4020 documents as running the RDNA 3 microarchitecture.
- Operating System: No Operating System selected upgrade
- Operating System Language: No Operating System Language selected upgrade
- Microsoft Productivity Software: None
- Memory: 64 GB LPDDR5X-6400MHz (Soldered)selected upgrade. Specs at: www.lenovo.com/gb/en/p/accessories-and-software/memory-and-storage/memory-and-storage-hard-drives/4xb1d04758 quotes "64 Gbps", i.e. 8 GB/s.
dd count=1M if=/dev/zero of=tmpgives only 255 MB/s however. - Solid State Drive: 2 TB SSD M.2 2280 PCIe Gen4 Performance TLC Opalselected upgrade
- Display: 14" WUXGA (1920 x 1200), IPS, Anti-Glare, Touch, 45%NTSC, 300 nits, 60Hz
- Camera: 1080P FHD RGB/IR Hybrid with Microphone
- Color: Thunder Black
- Factory Color Calibration: No Factory Color Calibration
- Wireless: Qualcomm Wi-Fi 6E NFA725A 2x2 AX & Bluetooth® 5.1 or above
- Integrated Mobile Broadband: No Wireless WAN
- Ethernet: Wired Ethernet
- Near Field Communication: No NFC
- Fingerprint Reader: Fingerprint Reader
- Keyboard: Black - English (EU)selected upgrade
- Battery: 4 Cell Li-Polymer 52.5Whselected upgrade
- Power Cord: 65W USB-C Slim 90% PCC 3pin AC Adapter - UKselected upgrade
- Electronic Privacy Filter: No ePrivacy Filter
- Adobe Elements: None
- Adobe Acrobat: None
- Adobe Creative Cloud: None
- Security Software: None
- Cloud Security Software: No Cloud Security Software
- Warranty: 3 Year Courier or Carry-in
Identifiers:
- Ethernet MAC address: fc:5c:ee:24:fb:b4
- Wi-Fi MAC address: 04:7b:cb:cc:1b:10
Upon arrival:
Buy research:
- www.phoronix.com/review/thinkpad-p14s-gen4 says Ubuntu running fine
- Intel vs amd: the Intel ones could come with a discrete rtx A500 GPU. GPU likely makes laptop heavier and less power efficient. And both have basically the same benchmark which is crazy:So the only downside is not being able to run CUDA.
- thought about Yoga or other Ultrabook options, but 2x price at same specs, so nah...
Log:
2024-01-17: firmware update:Actually fixed performance mode: askubuntu.com/questions/604720/setting-to-high-performance/1343879#1343879
Vendor: LENOVO
Version: R2FET36W (1.16 )
Release Date: 10/24/2023 Gridworld AI game Updated 2025-12-13
- github.com/google-deepmind/pushworld 2023 Too combinatorial, gripping makes it so much easier to move stuff around in the real world. But cool nonetheless.
Slack (software) Updated 2026-01-30
U-Math Updated 2026-01-30
XP School Updated 2026-05-30
Amazing self-directed learning direction:
world.hey.com/gwyn/no-excuses-bc4152fb mentions that the founder was inspired by other schools: High Tech High and Expeditionary Learning.
Lots of focus on showcase student work.
The founder Gwyn ap Harri is quite dirty mouthed, which is also cool.
Ciro Santilli tried to contact them in 2021 at: twitter.com/cirosantilli/status/1448924419016036353 and on website contact form to see if we could do some project together, but no reply.
Accounts controlled by Ciro Santilli Updated 2026-03-05
Ciro Santilli controls the following accounts.
With non-trivial activity:
- github.com/cirosantilli on GitHub
- stackoverflow.com/users/895245 on Stack Overflow
- www.linkedin.com/in/cirosantilli on LinkedIn
- www.youtube.com/c/CiroSantilli on YouTube
- Twitter: see Section "Ciro Santilli's Twitter accounts"
- archive.org/details/@cirosantilli2 on the Internet Archive. Was archive.org/details/@cirosantilli but got deleted due to an "admin error" and the old username cannot be restored![ref]
- en.wikipedia.org/wiki/User:Cirosantilli2 and commons.wikimedia.org/wiki/User:Cirosantilli2: Ciro tries to upload all educational CC content he creates to Wikimedia Commons as an extra backup and sometimes to use in Wikipedia pages
- www.facebook.com/cirosantilli/ Ciro accepts all friend requests there, but expect a few non-technical posts. Unless you look like a massive honeypot account, please send context in advance in that case.
- www.quora.com/profile/Ciro-Santilli
- www.reddit.com/user/cirosantilli/ is Ciro's Reddit account, mostly computer and China topics
- maps.app.goo.gl/npV35XTppSBTmNqC8: Google Maps. Ciro Santilli likes to make additions to certain niche topics that are missing, having reached Local Guide Level 6 as of 2024. He can't do as much as he'd like so as to not reveal his current city however.
Trivial or no activity:
- seqanswers.com/forums/member.php?u=90053
- answers.gazebosim.org/users/2289/cirosantilli/
- 4programmers.net/Profile/86786
- 500px.com/p/cirosantilli
- 9gag.com/u/cirosantilli
- addons.mozilla.org/en-US/firefox/user/cirosantilli/
- agoradesk.com/user/cirosantilli
- anaconda.org/cirosantilli
- androidforums.com/members/ciro-santilli.1918307
- app.element.io/#/user/@cirosantilli:matrix.org. Proof: matrix.to/#/!OisxJPszSYdWdwXrrL:matrix.org/$YbrChbGFvlgYiDM5E2OgWXSp0vy7ayLfGkCXftAUyTI?via=matrix.org
- archive.org/details/@ciro_santilli_ourbigbook created during the account deletion mess.
- ask.libreoffice.org/en/users/2352/cirosantilli/
- bbs.archlinux.org/profile.php?id=116270
- bitcointalk.org/index.php?action=profile
- brilliant.org/profile/ciro-il1uxz/
- bsky.app/profile/cirosantilli.bsky.social
- bugzilla.gnome.org/page.cgi?id=describeuser.html&login=ciro.santilli@gmail.com
- cirosantilli.blogspot.com/
- cirosantilli.itch.io
- cirosantilli.livejournal.com/profile
- cirosantilli.medium.com/ on Medium
- cirosantilli.substack.com/ and substack.com/@cirosantilli
- cirosantilli.wordpress.com/ on WordPress
- codeberg.org/cirosantilli
- codeforces.com/profile/cirosantilli reverse proof codeforces.com/blog/entry/98393
- coderwall.com/Ciro%20Santilli Note that space on the username. Beauty.
- community.arm.com/people/cirosantilli
- community.atlassian.com/t5/user/viewprofilepage/user-id/680821
- community.fandom.com/wiki/User:Cirosantilli
- community.openai.com/u/cirosantilli
- community.plos.org/people/cirosantilli
- community.skype.com/t5/user/viewprofilepage/user-id/2646858
- community.zimbra.com/members/cirosantilli
- connect.mozilla.org/t5/user/viewprofilepage/user-id/46889
- del.icio.us/cirosantilli
- dev.to/cirosantilli
- developer.mbed.org/users/cirosantilli/
- devtalk.nvidia.com/member/2118846/
- droit-finances.commentcamarche.net/profile/user/cirosantilli
- en.gravatar.com/cirosantilli
- en.wikipedia.org/wiki/User:Ciro.santilli also belongs to Ciro, but he lost the password
- eternagame.org/web/player/260828/
- exercism.org/profiles/cirosantilli
- figshare.com/authors/Ciro_Santilli/656781
- forums.developer.nvidia.com/u/cirosantilli
- forum.osdev.org/memberlist.php?mode=viewprofile&u=16372
- forum.pine64.org/member.php?action=profile&uid=17386
- forum.videolan.org/memberlist.php?mode=viewprofile&u=173503
- forum.xda-developers.com/member.php?u=7116837
- forums.androidcentral.com/members/cirosantilli-2734491
- forums.lenovo.com/user/viewprofilepage/user-id/1561639
- forums.hardwarezone.com.sg/members/cirosantilli.875544/
- framasphere.org/people/78a975c0b6c40133a3032a0000053625 framasphere.org/posts/1519871
- freesound.org/people/cirosantilli
- gitlab.com/u/cirosantilli
- hackaday.io/cirosantilli
- hinative.com/en-US/profiles/5276462
- home.gamer.com.tw/homeindex.php?owner=cirosantilli but can't post anything publicly because cannot verify phone in many countries
- huggingface.co/cirosantilli
- identity.kde.org/index.php?r=people/view&uid=cirosantilli
- imgur.com/user/cirosantilli/about: Proof: imgur.com/gallery/mexv1Bk/comment/1734086983
- jsfiddle.net/user/cirosantilli/
- kiwifarms.net/members/cirosantilli.82011/
- knockout.chat/user/22882
- launchpad.net/~cirosantilli
- leanprover.zulipchat.com/#user/1019866
- leanpub.com/u/cirosantilli
- leetcode.com/cirosantilli/
- makandracards.com/ciro-santilli
- mastodon.social/@cirosantilli
- nanohub.org/members/146301/
- next-episode.net/user/cirosantilli/
- openclipart.org/artist/cirosantilli. TODO but not yet able to login after the "first upload". But it did get uploaded: openclipart.org/artist/cirosantilli.
- opencollective.com/ciro-santilli
- open.spotify.com/user/cirosantilli
- orcid.org/0000-0003-2895-7763
- parler.com/profile/cirosantilli/posts
- paypal.me/cirosantilli. United Kingdom account.
- peerj.com/cirosantilli/
- profile.edx.org/u/ciro_santilli
- profiles.3dgames.com.ar/profiles/1002278
- protonmail.uservoice.com/users/6491333990-ciro-santilli
- pypi.org/user/cirosantilli/
- raidforums.com/User-cirosantilli
- rubygems.org/profiles/cirosantilli
- software.intel.com/en-us/user/1090688
- soundcloud.com/cirosantilli
- sourceforge.net/u/cirosantilli/profile/
- stackshare.io/cirosantilli
- steamcommunity.com/id/cirosantilli/
- subreply.com/cirosantilli
- support.discord.com/hc/en-us/profiles/427813342894 on the Discord forum
- support.mozilla.org/en-US/user/cirosantilli
- tabmixplus.org/forum/memberlist.php?mode=viewprofile&u=59846
- talk.commonmark.org/users/cirosantilli
- talk.jekyllrb.com/users/cirosantilli
- talks.cam.ac.uk/user/show/81142
- tatoeba.org/eng/user/profile/cirosantilli
- telegram.me/cirosantilli on Telegram
- trac.ffmpeg.org/wiki/Waveform?action=history username
cirosantilli - tuleap.net/users/cirosantilli
- tuleap.ring.cx/users/cirosantilli
- twittercommunity.com/users/cirosantilli/activity
- wefunder.com/cirosantilli
- wise.com/pay/me/cirod3. The name shows as "Ciro Duran Santilli" and that's correct.
- wiki.qemu.org/User:Cirosantilli
- www.airbnb.com/users/show/45794827
- www.behance.net/cirosantilli
- www.bibsonomy.org/user/cirosantilli
- www.biostars.org/u/50170/
- www.bountysource.com/people/25676-ciro-santilli
- www.bulletphysics.org/Bullet/phpBB3/memberlist.php?mode=viewprofile&u=11704
- www.codewars.com/users/cirosantilli
- www.codingame.com/profile/cddd0a711c22d97e8264361f7c8205567563841
- www.coursera.org/user/f65b08c191d792eb809fe2808d771ee7
- www.dailymotion.com/cirosantilli
- www.deviantart.com/cirosantilli
- www.digitalocean.com/community/users/cirosantilli
- www.ebay.com/usr/cirosantilli
- www.edaboard.com/member587087.html
- www.flickr.com/people/cirosantilli/. Account auto deleted tested as of 2025. Created: flickr.com/photos/202496646@N08/. Was something nicer, tried to change username to
cirosantilli2but got hat instead. Alsocirosantilliwas marked taken. What a bullshit website! Poor Canadians, sold off to Yahoo and let their baby be mutilated. - www.freecodecamp.org/fcc8f660b91-167c-4b04-a8da-5d50cdb46def
- www.f6s.com/cirosantilli
- www.f6s.com/cirosantilli1
- www.gitbook.com/@cirosantilli
- www.hackerrank.com/cirosantilli
- www.hackster.io/cirosantilli
- www.html5gamedevs.com/profile/30103-cirosantilli/
- www.imdb.com/user/ur59802249 on IMDb
- www.instagram.com/cirosantilli/ Impossible to disable their notifications without removing your email. So all their notifications go to trash.
- www.kaggle.com/cirosantilli
- www.lesswrong.com/users/ciro-santilli on LessWrong
- www.linux.org/members/ciro-santilli.62540/
- www.linuxquestions.org/questions/user/cirosantilli-688439/
- www.meetup.com/members/252568305/
- www.mentebinaria.com.br/profile/1987-ciro-santilli/
- www.metacritic.com/user/cirosantilli
- www.metaculus.com/accounts/profile/163587/
- www.mohu.rocks/people/cirosantilli
- www.mudhut.com/user/1995000
- www.myopportunity.com/en/profile/ciro-santilli
- www.npmjs.com/~cirosantilli
- www.opengl.org/discussion_boards/member.php/40269-cirosantilli
- www.openstreetmap.org/user/Ciro%20Santilli
- www.patreon.com/cirosantilli
- www.physicsforums.com/members/cirosantilli.422056/
- www.pixiv.net/en/users/64347194
- www.plurk.com/cirosantilli
- www.raspberrypi.org/forums/memberlist.php?mode=viewprofile&u=273389
- www.shadertoy.com/user/cirosantilli
- www.strava.com/athletes/47913768
- www.tastekid.com/ciro.santilli
- www.ted.com/profiles/5822760
- www.threads.com/@cirosantilli
- www.thestudentroom.co.uk/member.php?u=5930160
- www.tiktok.com/@cirosantilli2
- www.transifex.com/user/profile/cirosantilli
- www.tripadvisor.com/members/cirosantilli
- www.twitch.tv/cirosantilli
- www.whatdotheyknow.com/user/ciro_santilli/profile "Banned for spamming" as of 2024. One of those idiotic websites where you can't add a link to your homepage to your own profile page.
Lost or deleted:
- projecteuler.net/profile/cirosantilli.png Blocked 2025-10-01 due to their stupid policy that you can't give away answers within 12 hours of: github.com/lucky-bai/projecteuler-solutions/pull/94
{kind=link}
Accounts in Chinese websites. These accounts might be banned or altered or offer other limitations, so Ciro only communicates briefly through them. All communication through those channels should obviously be assumed to be compromised:
- bbs.nibaedu.com/index.php?m=space&uid=70
- www.renren.com/338003848/profile
- www.tianya.cn/109285544 (can't post, no cell phone)
- hacpai.com/member/cirosantilli unable to login as of 2019-10-12, reason unclear, either ban or website too crappy.
- pincong.rocks/people/cirosantilli Lost account tested as of 2022-11 and likely much earlier. Last existing password not working, and there doesn't seem to be a reset password button. Creating cirosantilli2
- pincong.rocks/people/cirosantilli2
- tieba.baidu.com/home/main?id=5cd56369726f73616e74696c6c69c944
- v2ex.com/member/cirosantilli: Ciro was blocked and or account deleted on 2020-07-23: cirosantilli.com/china-dictatorship/v2ex
- v2ex.com/member/cirosantilli2: was created by someone else most likely and cannot be re-registered. Also blocked.
- v2ex.com/member/cirosantilli3: Ciro created this new account November 2023, let's see how long it lasts.
- www.zhihu.com/people/cirosantilli. Ciro was prevented from posting in 2018-06-25, and the account and all content mentioning him were taken down in 2019-11-03.
- www.weibo.com/p/1005055601627311: started requiring a cell phone to login in 2020, and Ciro didn't want to give his cell phone number to the CCP and didn't have the patience to manage a secondary phone number, so he is not logging in for now. The account was blocked in 2021: cirosantilli.com/china-dictatorship/ciro-santillis-weibo-block
Dead websites:
- www.citeulike.org/user/cirosantilli (2019-05)
Kaggle Updated 2026-01-30
To be fair, this is one of the least worse ones.
Sponsor Ciro Santilli's work on OurBigBook.com Taxation Updated 2026-01-30
Ciro Santilli is a UK resident. He will register as a "solo trader" (slightly funny legal term) and treat donations that he uses for projects as grants, which pay regular income tax:
The rates are given at: www.gov.uk/income-tax-rates and are as of writing:
- 0 - £12,570 0%
- £12,571 - £50,270: 20%
- £50,271 - to £125,140: 40%
- £125,140: 45%
National insurance is also likely going to be paid: www.gov.uk/self-employed-national-insurance-rates:
Fortunately however VAT does not need to be paid.
The amount that will be declared is the same as he grant amount that was requested, e.g. if 100k USD is requested for 1 year, then 100k USD will be pro-rata declared on that year.
Any remaining donations that don't yet meet specific grant goals will be initially treated as cash gifts which pay no tax. If in the future they are used as grant money after further goal amounts are reached, then they will taxed as grants.
Note however that if the donor is UK-based and dies within 7 years of the gift being given, inheritance tax has to be paid on them as per: www.gov.uk/inheritance-tax/gifts, at a maximum of 32% and going to to 0% at 7 years, so let me know from the afterlife.
Ciro paid his bill for £24,321.87 ($32,729.70) on 2026-01-02. Announcements:
Education is broken Updated 2026-01-30
Once Ciro was at a University course practical session, and a graduate was around helping out. Ciro asked if what the graduate did anything specifically related to the course, and they replied they didn't. And they added that:Even though Ciro was already completely disillusioned by then, that still made an impression on him. Something is really wrong with this shit.
One has to put the bread on the table.
Other people that think that the educational system is currently bullshit as of 2020:
- Einstein, quoted in The New York Times, March 13 1949, p. 34:[ref]
- Ron Maimon
- Xavier Niel: fortune.com/2018/11/30/billionaire-xavier-niel/ "Want This Billionaire's Attention? Drop Out of School" (2018). He also created 42.
- Year On
- by Zach Caceres
- Anand Raja submission "Students and Universities": publications.parliament.uk/pa/cm200809/cmselect/cmdius/170/170ii.pdf, www.linkedin.com/in/anandraja/.
- xsrus.com/life-school-and-the-80-20-rule. Also GPA 2.0 linked from xsrus.com/ to xsrus.com/gpa-2.0 but down now
- A Mathematician's Lament by Paul Lockhart www.maa.org/external_archive/devlin/LockhartsLament.pdf
- www.learningforreal.org/quotes/ quotes Elbert Hubbard:She's somewhat focused on the performing arts, but what she says applies basically equally well to the natural sciences. A talk: www.youtube.com/watch?v=ggYL9gQeVEk She talks about authentic learning.
- www.youtube.com/watch?v=iG9CE55wbtY Do schools kill creativity? by Sir Ken Robinson (2017)
- Erik Finman thinks school is broken
- sociable.co/technology/silicon-valley-education-students-entrepreneurs/ Bringing Silicon Valley into Schools: How to Make Students Entrepreneurs of Their Own Education (2016)
- hackeducation.com/2015/04/25/factory-model The Invented History of 'The Factory Model of Education' by Audrey Watters (2015)
- www.forbes.com/councils/forbescoachescouncil/2025/04/17/the-ai-fear-factor-why-leaders-resist-and-how-to-move-forward/ The Single Best Idea for Reforming K-12 Education by Steve Denning (2011)
The problem with education by Ciro Santilli
. Source. In this video Ciro Santilli exposes his fundamental philosophy regarding why Education is broken. This philosophy was the key motivation behind the failed OurBigBook Project.
The true value of snake oil is intangible as well.
David Deutsch on Education interviewed by Aidan McCullen (2019)
Source. Key quote that hits the nail:
So right... the purpose of education is not to teach facts. The purpose of education is to propose ways of thinking, which students themselves must try to apply and decide if it suits them! And use the patterns of thinking that are useful to reach their goals.
Like Noam Chomsky, he proposes education has been a system of indoctrination more than anything else e.g. twitter.com/daviddeutschoxf/status/1406374921748496386:At twitter.com/DavidDeutschOxf/status/1051475227476185089 another good quote by Churchill:
All compulsory education, "tough" or not, "love" or not, in camps or not, and whether it "traumatises" or not, is a violation of human rights.
Headmasters have powers at their disposal with which Prime Ministers have never yet been invested.
Quote selection by Charles Bukowski (2016)
Source. Generally speaking, you're free until you're about 4 years old. Then you go to grammar school and then you start becoming... oriented and shoved into areas. You lose what individualism you have, if you have enough of course, you retain some of it... Then you work the 8 hour job with almost a feeling of goodness, like you're doing something. Then you get married like marriage is a victory, and you have children like children is a victory... Marriage, birth, children. It's something they have to do because there's nothing else to do. There's no glory in it, there's no steam, there's no fire. It's very, very flat... You get caught into the stricture of what you're supposed to be and you have no other choice. You're finally molded and melded into what you're supposed to be. I didn't like this.
Home Updated 2026-05-30
Check out: OurBigBook.com, the best way to publish your scientific knowledge. It's an open source note taking system that can publish from lightweight markup files in your computer both to a multi-user mind melding dynamic website, or as a static website. It's like Wikipedia + GitHub + Stack Overflow + Obsidian mashed up. Source code: github.com/ourbigbook/ourbigbook.
Sponsor me to work on this project. For 1M USD I will quit my job and work on OurBigBook full time for three more years to try and kickstart The Higher Education Revolution. Status: ~44k / 400k USD. At 4M USD I retire/tenure and work on open STEM forever. How to donate: Section "Sponsor Ciro Santilli's work on OurBigBook.com".
I first quit my job 1st June 2024 to work on the project for 1 year after I reached my initial 100k goal mostly via a 1000 Monero donation.
Mission: to live in a world where you can learn university-level mathematics, physics, chemistry, biology and engineering from perfect free open source books that anyone can write to get famous. More rationale: Section "OurBigBook.com"
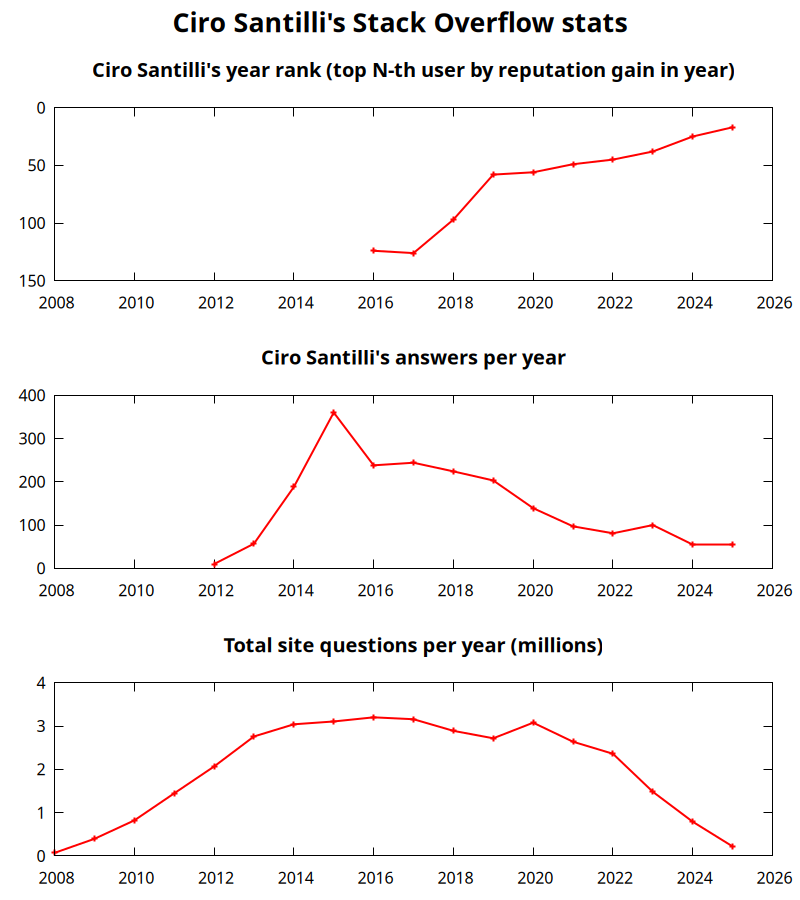
Explaining things is my superpower, e.g. I was top user #39 on Stack Overflow in 2023[ref][ref] and I have a few 1k+ star educational GitHub repositories[ref][ref][ref][ref]. Now I want to bring that level of awesomeness to masters level Mathematics and Physics. But I can't do it alone! So I created OurBigBook.com to allow everyone to work together towards the perfect book of everything.
My life's goal is to bring hardcore university-level STEM open educational content to all ages. Sponsor me at github.com/sponsors/cirosantilli starting from 1$/month so I can work full time on it. Further information: Section "Sponsor Ciro Santilli's work on OurBigBook.com". Achieving what I call "free gifted education" is my Nirvana.
This website is written in OurBigBook Markup, and it is published on both cirosantilli.com (static website) and outbigbook.om/cirosantilli (multi-user OurBigBook Web instance). Its source code is located at: github.com/cirosantilli/cirosantilli.github.io and also at
cirosantilli.com/_dir and it is licensed under CC BY-SA 4.0 unless otherwise noted.To contact Ciro, see: Section "How to contact Ciro Santilli". He likes to talk with random people of the Internet.
GitHub | Stack Overflow | LinkedIn | YouTube | Twitter | Wikipedia | Zhihu 知乎 | Weibo 微博 | Other accounts

Besides that, I'm also a freedom of speech slacktivist and recreational cyclist. I like Chinese traditional music and classic Brazilian pop. Opinions are my own, but they could be yours too. Tax the rich.
Let's create an educational system with:
- no distinction between university and high school, students just go as fast as they can to what they really want without stupid university entry exams
- fully open source learning material
- on-demand examinations that anyone can easily take without prerequisites
- granular entry selection only for space in specific laboratories or participation in specific novel research projects
I offer:
- online private tutoring for:
- any STEM university course
- passionate younger STEM students (any age) who want to learn university level material and beyond. Can your kid be the next Fields Medalist or Nobel Prize winner? I'm here to help, especially if you are filthy rich! I focus moving students forward as fast as they want on and on producing useful novel tutorials and results
Let your child be my Emile, and me be their Adolfo Amidei, and let's see how far they can go! I will help take your child:and achieve their ambitious STEM goals!- into the best universities
- into the best PhD programs
- educational consulting for institutions looking to improve their STEM courses
- do you know that course or teacher that consistently gets bad reviews every year? I'll work with the teacher to turn the problem around!
- are you looking to create a consistent open educational resources offering to increase your institutions internationally visibility? I can help with that too.
My approach is to:For minors, parents are welcome to join video calls, and all interactions with the student will be recorded and made available to parents.
- propose interesting research projects. The starting point is always deciding the end goal: Section "Backward design"
- learn what is needed to do the project together with the student(s)
- publish any novel results or tutorials/tools produced freely licensed online, and encourage the student to do the same (Section "Let students learn by teaching", digital garden)
I have a proven track of explaining complex concepts in an interesting and useful way. I work for the learner. Teaching statement at: Section "How to teach". Pricing to be discussed. Contact details at: Section "How to contact Ciro Santilli".
I am particularly excited about pointing people to the potential next big things, my top picks these days are:I am also generally interested in:
- quantum computing
- AGI research, in particular AI code generation, automated theorem proving and robotics
- assorted molecular biology technologies
- 20th century physics, notably AMO and condensed matter
- the history of science, and in particular trying to look at seminal papers of a field

The problem with education by Ciro Santilli
. Source. In this video Ciro Santilli exposes his fundamental philosophy regarding why Education is broken. This philosophy was the key motivation behind the failed OurBigBook Project.Introduction to the OurBigBook Project
. Source. OurBigBook Web topics demo
. Source. The OurBigBook topic feature allows users to "merge their minds" in a "sort by upvote"-stack overflow-like manner for each subject. This is the killer feature of OurBigBook Web. More information at: docs.ourbigbook.com/ourbigbook-web-topics.OurBigBook dynamic article tree demo
. Source. The OurBigBook dynamic tree feature allows any of your headers to be the toplevel h1 header of a page, while still displaying its descendants. SEO loves this, and it also allows users to always get their content on the correct granularity. More information at: docs.ourbigbook.com/ourbigbook-web-dynamic-article-tree.OurBigBook local editing and publishing demo
. Source. With OurBigBook you can store your content as plaintext files in a Lightweight markup, and then publish that to either OurBigBook.com to get awesome multi-user features, or as a static website where you are in full control. More information at: docs.ourbigbook.com/publish-your-content.Top Down 2D continuous game with Urho3D C++ SDL and Box2D for Reinforcement learning by Ciro Santilli (2018)
Source. More information: Section "Ciro's 2D reinforcement learning games". This is Ciro's underwhelming stab at the fundamental question: Can AGI be trained in simulations?. This project could be taken much further.
-------------------------------------
| Force of Will 3 U U |
| --------------------------------- |
| | //////////// | |
| | ////() ()\////\ | |
| | ///_\ (--) \///\ | |
| | ) //// \_____///\\ | |
| | ) \ / / / / | |
| | ) / \ | | / _/ | |
| | ) \ ( ( / / / / \ | |
| | / ) ( ) / ( )/( ) \ | |
| | \(_)/(_)/ /UUUU \ \\\/ | | |
| .---------------------------------. |
| Interrupt |
| ,---------------------------------, |
| | You may pay 1 life and remove a | |
| | blue card in your hand from the | |
| | game instead of paying Force of | |
| | Will's casting cost. Effects | |
| | that prevent or redirect damage | |
| | cannot be used to counter this | |
| | loss of life. | |
| | Counter target spell. | |
| `---------------------------------` |
| l
| Illus. Terese Nelsen |
-------------------------------------Code 1. .
Artist unknown, uploaded December 2014. Part of Section "Cool data embedded in the Bitcoin blockchain" where Ciro Santilli maintains a curated list of such interesting inscriptions.
This was a small project done by Ciro for artistic purposes that received some attention due to the incredible hype surrounding cryptocurrencies at the time. Ciro Santilli's views on cryptocurrencies are summarized at: Section "Are cryptocurrencies useful?".

YellowRobot.jpgJPG image fully embedded in the Bitcoin blockchain depicting some kind of cut material art depicting a yellow robot, inscribed on January 29, 2017.
Ciro Santilli found this image and others during his research for Section "Cool data embedded in the Bitcoin blockchain" by searching for image fingerprints on every transaction payload of the blockchain with a script.
The image was uploaded by EMBII, co-creator of the AtomSea & EMBII upload mechanism, which was responsible for a large part of the image inscriptions in the Bitcoin blockchain.
The associated message reads:This is one of Ciro Santilli's favorite AtomSea & EMBII uploads, as it perfectly encapsules the "medium as an art form" approach to blockchain art, where even non-novel works can be recontextualized into something interesting, here depicting an opposition between the ephemeral and the immutable.
Chiharu [EMBII's Japanese wife] and I found this little yellow robot while exploring Chicago. It will be covered by tar or eventually removed but this tribute will remain. N 41.880778 E -87.629210

2010 Wayback Machine archive of starwarsweb.net
. This website was used as one of the CIA 2010 covert communication websites, a covert system the CIA used to communicate with its assets. More details at: Section "CIA 2010 covert communication websites".
Ciro Santilli had some naughty OSINT fun finding some of the websites of this defunct network in 2023 after he heard about the 2022 Reuters report on the matter, which for the first time gave away 7 concrete websites out of a claimed 885 total found. As of November 2023, Ciro had found about 350 of them.

2010 Wayback Machine archive of noticiasmusica.net
. This is another website that was used as one of the CIA 2010 covert communication websites. This website is written in Brazilian Portuguese, and therefore suggests that the CIA had assets in Brazil at the time, and thus was spying on a "fellow democracy".
Although Snowden's revelations made it extremely obvious to the world that the USA spies upon everyone outside of the Five Eyes, including fellow democracies, it is rare to have such a direct a concrete proof of it visible live right on the Wayback Machine. Other targeted democracies include France, Germany, Italy and Spain. More details at: USA spying on its own allies.
This investigative report by Ciro Santilli was featured on the Daily Mail after 404 Media reported on it in 2025.

Diagram of the fundamental theorem on homomorphisms by Ciro Santilli (2020)
Shows the relationship between group homomorphisms and normal subgroups.
Used in the Stack Exchange answer to What is the intuition behind normal subgroups? One of Section "The best articles by Ciro Santilli".

Spacetime diagram illustrating how faster-than-light travel implies time travel by Ciro Santilli (2021)
Used in the Stack Exchange answer to Does faster than light travel imply travelling back in time?. One of Section "The best articles by Ciro Santilli".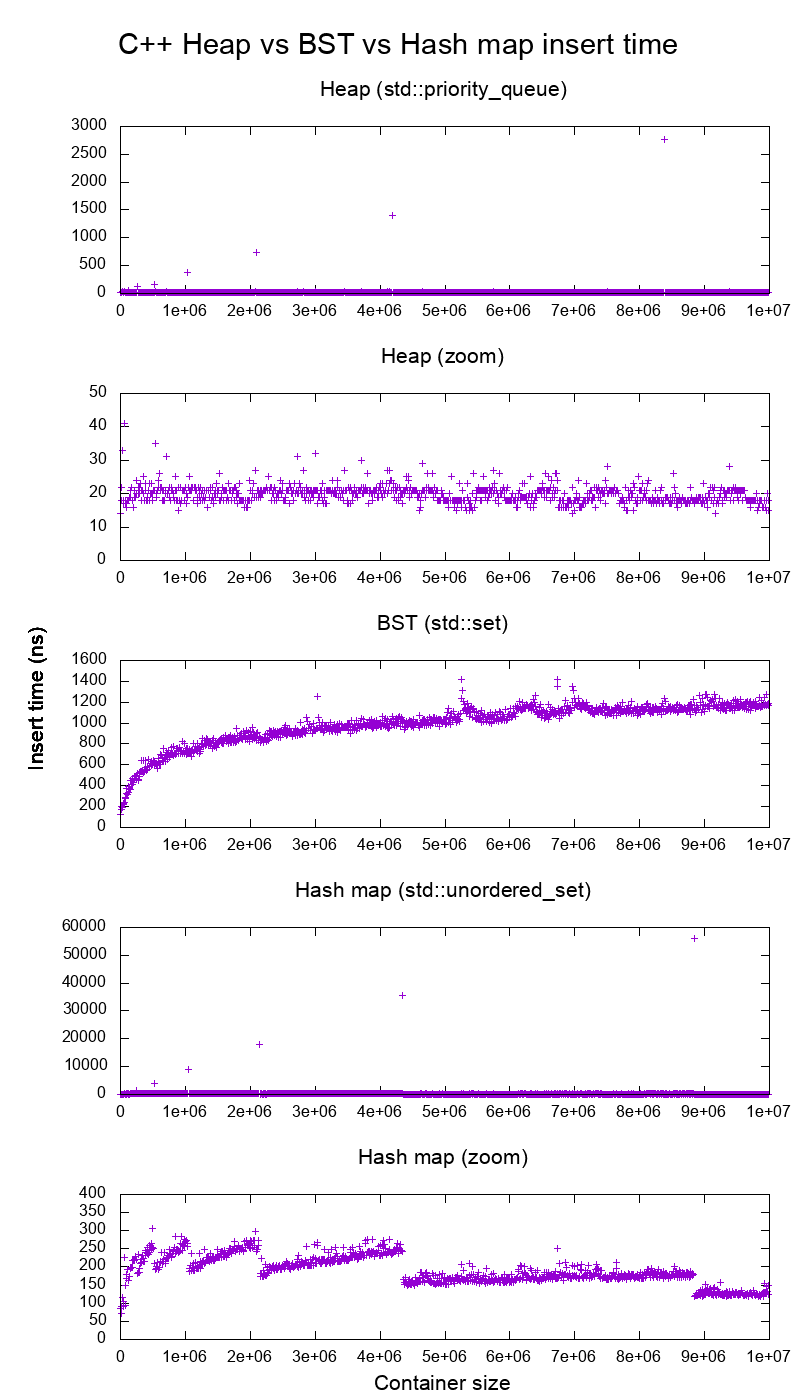
Average insertion time into heaps, binary search tree and hash maps of the C++ standard library by Ciro Santilli (2015)
Source. Used in the Stack Overflow answer to Heap vs Binary Search Tree (BST). One of Section "The best articles by Ciro Santilli".
Top view of an open Oxford Nanopore MinION
. Source. This is Ciro Santilli's hand on the Wikipedia article: en.wikipedia.org/wiki/Oxford_Nanopore_Technologies. He put it there after working a bit on Section "How to use an Oxford Nanopore MinION to extract DNA from river water and determine which bacteria live in it" :-) And he would love to document more experiments like that one Section "Videos of all key physics experiments", but opportunities are extremely rare.{kind=link}
A quick 2D continuous AI game prototype for reinforcement learning written in Matter.js, you can view it on a separate page at cirosantilli.com/_raw/js/matterjs/examples.html#top-down-asdw-fixed-viewport. This is a for-fun-only prototype for Ciro's 2D reinforcement learning games, C++ or maybe Python (for the deep learning ecosystem) seems inevitable for a serious version of such a project. But it is cute how much you can do with a few lines of Matter.js!
HTML snippet:
<iframe src="_raw/js/matterjs/examples.html#top-down-asdw-fixed-viewport" width="1000" height="850"></iframe> Sponsor Ciro Santilli's work on OurBigBook.com Progress updates Updated 2025-11-21
Ciro Santilli wants to make sure that you get clear highlights of what your donation money is going into!Sponsors also receive the "Ciro's Edit" email newsletter if desired, which contains similar updates to the above, but delivered directly to their inbox.
Fermat's last theorem Updated 2026-01-30
Google custom hardware Updated 2026-01-30
Automatic programming Updated 2025-11-30
The ultimate high level of which is of course to program with:which is basically the goal of artificial general intelligence, especially according to The Employment Test definition of AGI.
The term has not always had that sense:sums it up.
automatic programming has always been a euphemism for programming in a higher-level language than was then available to the programmer
Personality type Updated 2025-11-05
Silk Road (marketplace) Updated 2025-11-05
Ciro Santilli has become slightly obsessed with this story, and the main mastermind Ross Ulbricht.

The best article available so far is: www.theregister.co.uk/2019/01/29/how_i_caught_silk_road_mastermind (archive) which summarizes what one of the investigators said in a 2019 French computer security conference.
The key living posts are:
- stackoverflow.com/questions/15445285/how-can-i-connect-to-a-tor-hidden-service-using-curl-in-php (archive) which was originally asked under the real name, and then the username was changed to "Frosty", which matches one of the server's logins after the laptop was captured
- altoid early Silk Road mention: bitcointalk.org/?topic=175.70;wap2 (archive)
The big question is of course how libertarian free market ideologically motivated the website was, and how purely criminal greed it was.
The magnitude of the early operational security mistakes does make Ciro think that Ross did it "because he could" and "for the lolz" in a real world Breaking Bad way.
The entry in Ross' diary does resonate a lot with Ciro and any entrepreneur, full diary at: www.wired.com/2015/01/heres-secret-silk-road-journal-laptop-ross-ulbricht/ (archive).
[i]n 2011," [I believe I will be] "creating a year of prosperity and power beyond what I have ever experienced before,Silk Road is going to become a phenomenon and at least one person will tell me about it, unknowing that I was its creator."
Having this kind of feeling, is the greatest thing any human can have, and what motivates all great things.
Capitalizing in illegal things though is a cheat, big things take longer than a few years to reach, but reaching them is that much more satisfying as well.
Other interesting quotes:which Ciro also feels, see don't be a pussy, and:
Everyone knows I am working on a bitcoin exchange. I always thought honesty was the best policy and now I didn't know what to do. I should have just told everyone I am a freelance programmer or something, but I had to tell half truths. It felt wrong to lie completely so I tried to tell the truth without revealing the bad part, but now I am in a jam. Everyone knows too much. Dammit.
Also very worth reading is the San Francisco flat mate account: www.vice.com/en_us/article/ae3q8g/my-roommate-the-darknet-drug-lord (archive).
The murder for hire allegations are also interesting: mashable.com/2013/10/03/silk-road-hits, he paid 80k dollars to undercover DEA agents!
Except for the fact that Ross was an 80 million Dollar drug lord, those accounts sound exactly like what you would expect from any other nerdy startup founder! The:
- "just do it" strategy effectively going to a minimal viable product (manual transaction management!), while making many mistakes along the way, including hiring mistakes and successes when scaling is needed
- the hardship of self bootstrapping your own social network (here with some kilos of mushrooms)
- the variety of periods, from relatively calm, to hair pulling stress during big changes
It is also amusing to see very concretely the obvious fact that the FBI can get a subpoena for all accounts you ever had, e.g. they knew his laptop model from Amazon and brought a corresponding power cable to the arrest! If you are going to be a cyber criminal, don't use your real name, ever!
Should justice be blind? Maybe. But it does hurt for mere non-blind men to see it sometimes. Especially when drug liberalization is involved.
Uncanny valley Updated 2025-11-05
Side project time Updated 2025-11-05
Unlisted articles are being shown, click here to show only listed articles.